撮影の仕方(低密度/高密度)
低密度/高密度
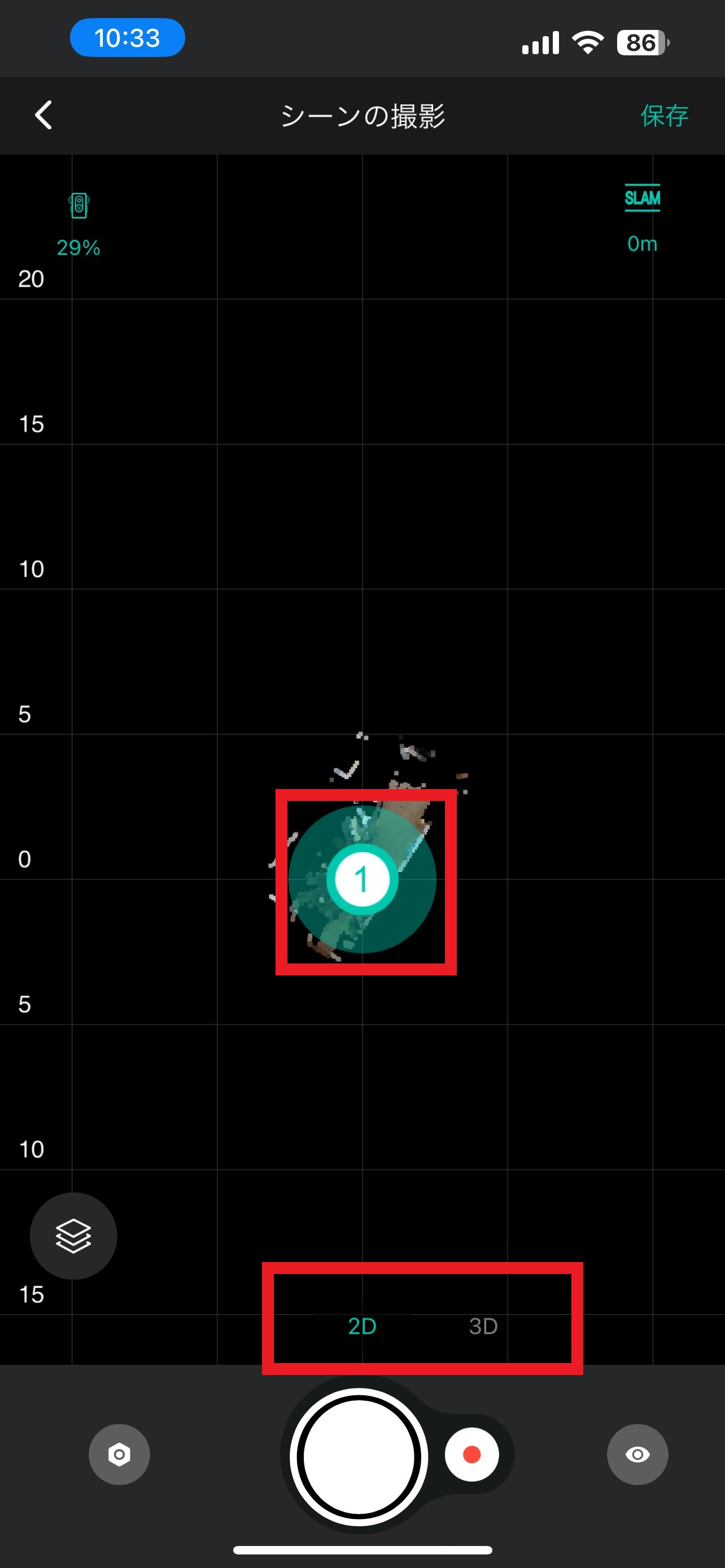
- 撮影ボタンを押すとカメラが60度ずつ自動で回転します。 撮影者は写りこまないように、常にカメラの背後に移動します。
- 「撮影中」→「計算中」と切り替わり、撮影が完了すると、撮影ポイントが表示され、タップすると360°画像を確認できます。
3Dボタンを押すと点群の確認ができます。(アプリ上で確認できるよう粗めに表示されます。) - 撮影を続ける場合は、カメラを移動させて、再度撮影ボタンを押します。
- 以降は3の手順を繰り返し、撮影していきます。
| 撮影ポイント間隔(仕様) | 推奨 | |
|---|---|---|
| 低密度 | 1.5~15m | 1.5~5m |
| 高密度 | 1.5~30m | 1.5~10m |
Tips
・夜などの暗い環境での撮影をする場合、撮影時間が延びる可能性があります。
・撮影に使用する端末のスペックによっては、撮影ポイントが多くなるにつれ、アプリがおちる可能性があります。




・エラー:撮影ポイントの位置がずれたとき
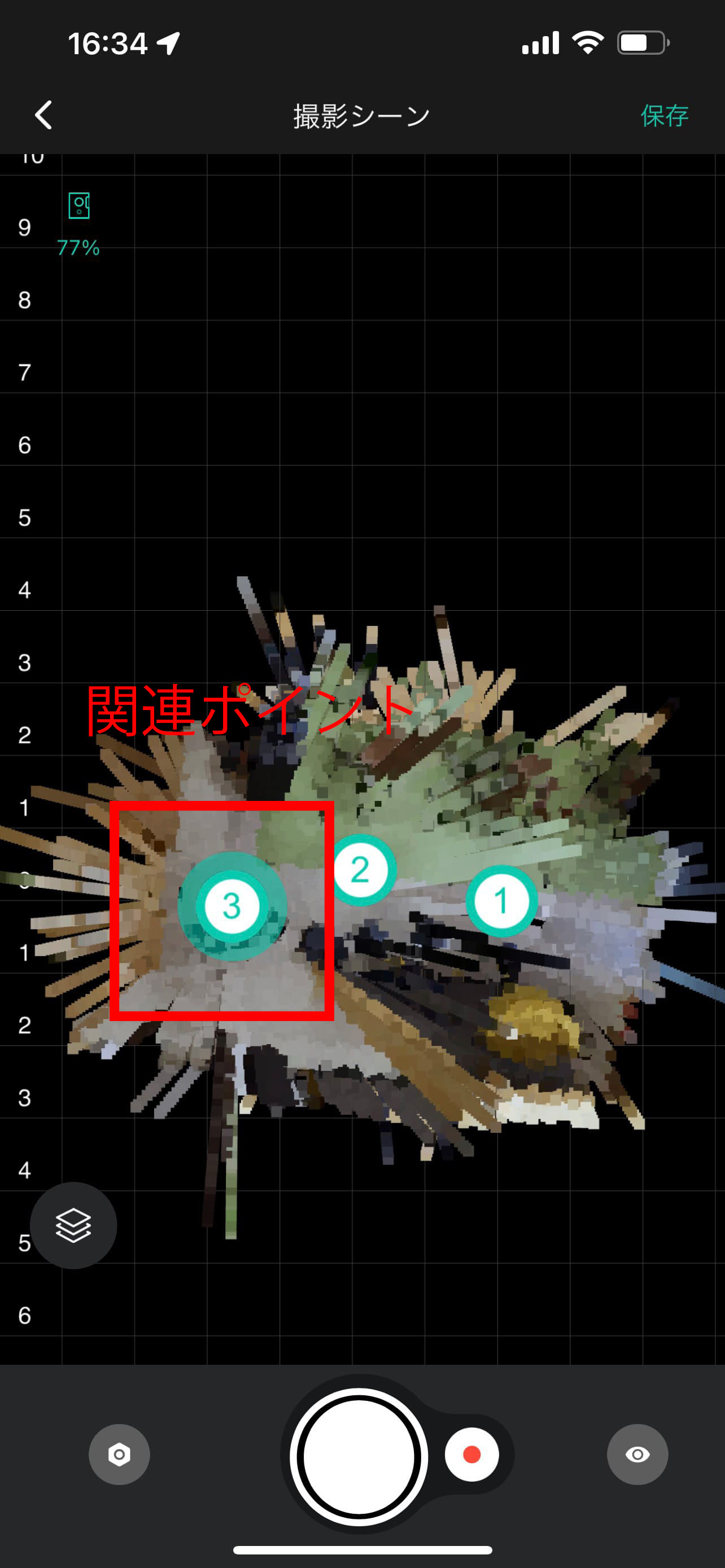
カメラは関連ポイントと現ポイントの画像や点群のラップ率をもとに、計算処理をしています。
関連ポイントと現撮影ポイントの点群のラップ率が10%未満の場合、下記のような通知がでます。
※関連ポイントとは、撮影ポイントが緑色に光っているポイントのことです。
おもに、最後に撮影したポイントが関連ポイントになります。
エラーが発生した場合は、現ポイントを削除して、関連ポイントとの距離を狭めて再撮影を推奨しています。
もしくは、下記のように手動で位置調整をします。
「ポイントの位置調整」を選択し、「水平方向調整」「高さ調整」で位置を調整します。
ポイントをドラッグさせると、上下に移動でき、下部のバーをスライドさせると回転させることができます。
関連ポイントとの共通の特徴点(壁等)を探し、重ね合わせるように調整します。
調整が終わったら、右上の「保存」をします。
Tips
エラーが発生しやすい例
・壁や障害物等との距離が近すぎる
→可能であれば、1m程度離して撮影してください
・関連ポイントとの周囲の環境が変わりすぎている
・関連ポイントとの距離が離れすぎている
→関連ポイントの切り替えはこちら
・撮影環境が明るい場所から暗い場所に切り替わるとき
・夜やトンネルなど暗い環境での撮影
・階段や狭い通路
・変化点が少ない環境
・ドーム撮影(動画)
360度パノラマの1画角(60度程度)だけ動画にする機能です。
- 動画を撮りたい場所、方向にカメラのレンズを向け、設置します。右下のプレビューで画角の確認ができます。
- 動画撮影ボタンを押します。通常通りまず画像の撮影が始まります。
- 画像の撮影が終わったら、そのまま動画撮影画面に遷移します。(画像撮影後、カメラは動かさないでください)
- 赤い撮影ボタンを押し、撮影を始めます。(音声は入りません)
- 再度赤いボタンを押して終了します。
- 動画を撮影したポイントには、再生マークがつき、画面上部の画像/ビデオで切り替え、確認ができます。
Tips
クラウドにアップロードし、計算処理が終わると合成されたものが見れるようになります。
1番最初のポイントでの動画撮影はお控えください。データ読み込みが遅くなる可能性があります。
SLAMモードでは対応しておりません。
・ドーム撮影(動画)サンプル
・続きから撮影
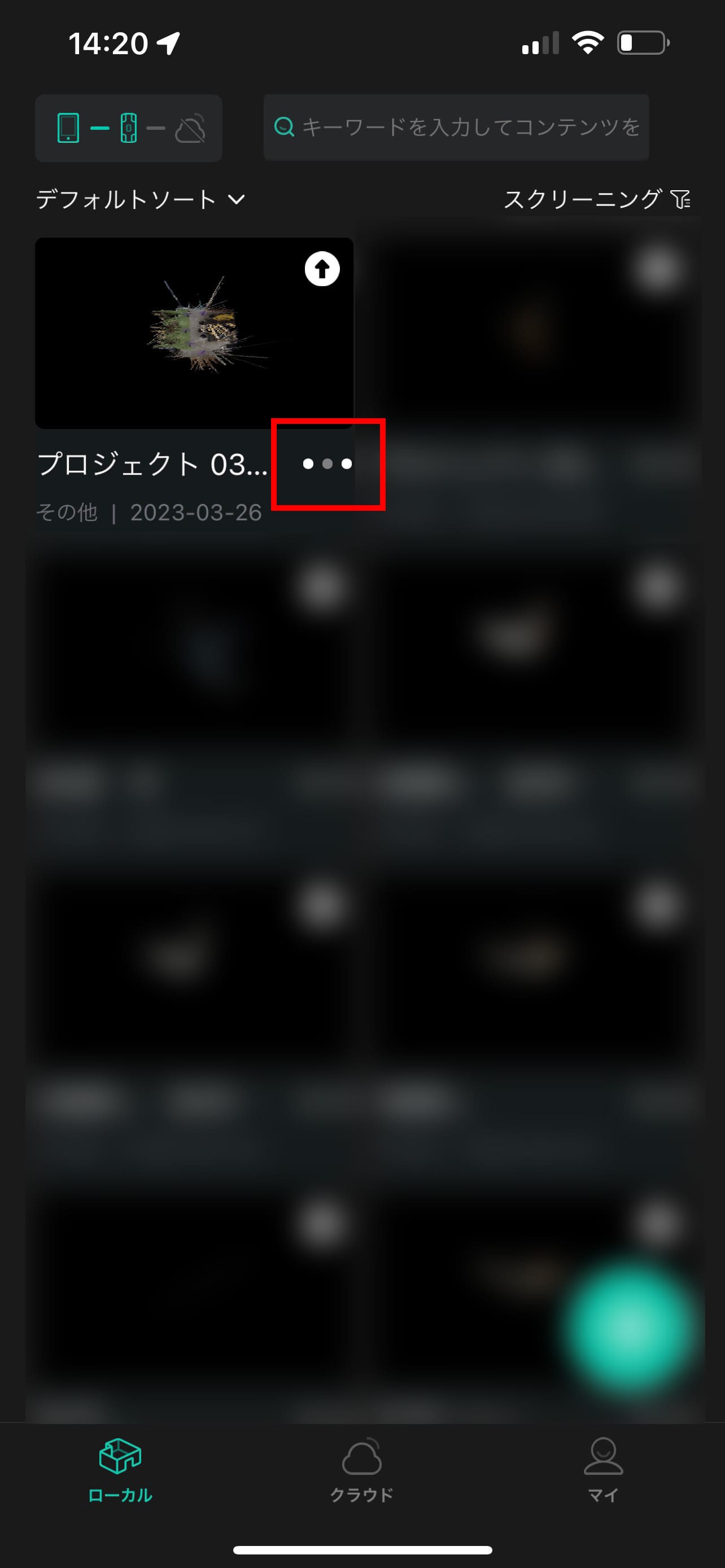
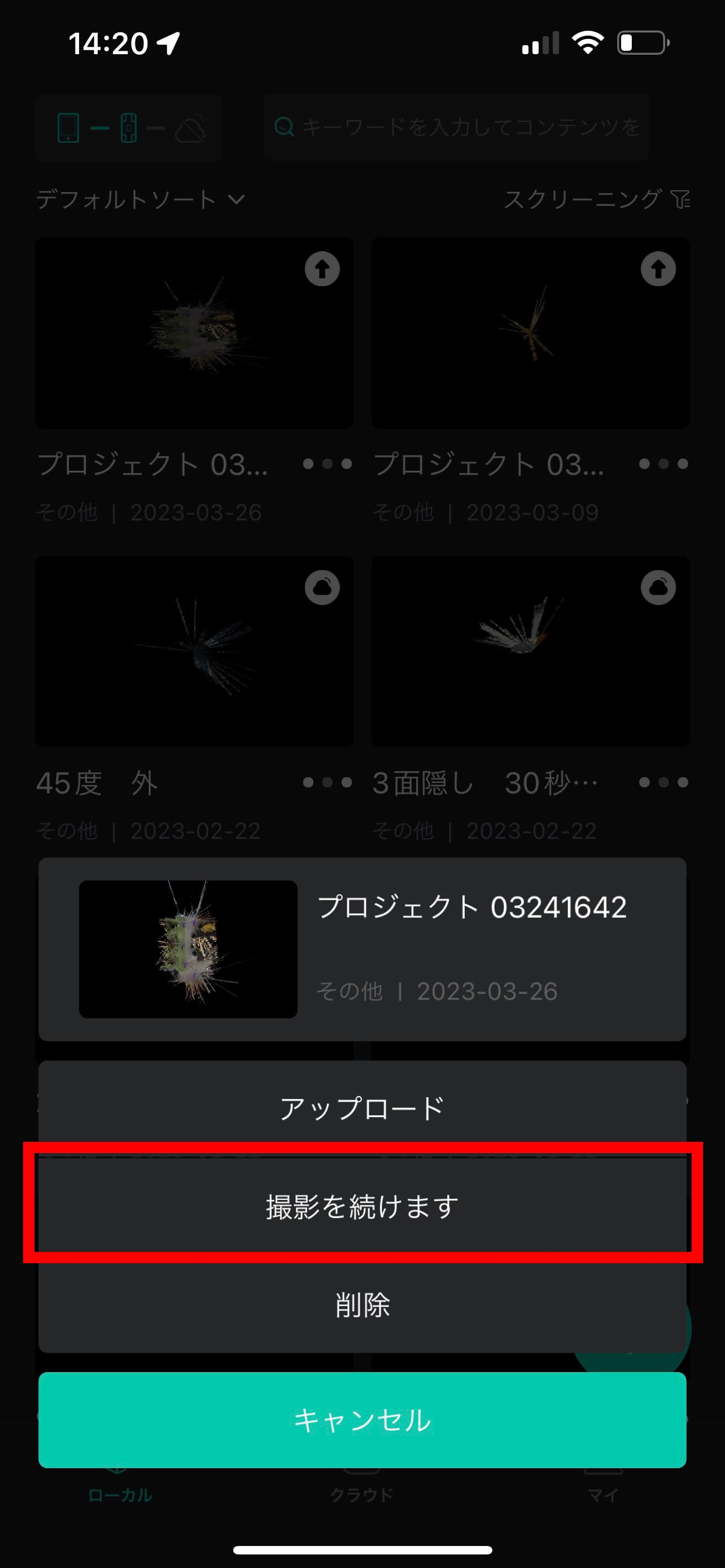
1度保存したデータの続きから撮影をする場合は、「‥」→「撮影を続ける」をタップします。
※対象シーンがクラウド計算処理中はできません。
・撮影ポイントの削除方法
- 撮影画面で削除したいポイントをタップします。
- 画面右上の「ゴミ箱」マークをタップすると、そのポイントを削除できます。